

When linking a microcontroller to a sensor, display, or another module, do you ever consider how these devices communicate with each other? What exactly is their dialogue like, and how do they manage to comprehend each other?
The interaction between electronic devices mirrors human communication. Both parties must speak a shared language. In electronics, these languages are known as communication protocols. Fortunately, there are only a handful of these protocols essential for most DIY electronics projects. Throughout this series of articles, we will explore the fundamentals of the three most prevalent protocols: Serial Peripheral Interface (SPI), Inter-Integrated Circuit (I2C), and Universal Asynchronous Receiver/Transmitter (UART) communication.
We will start by outlining basic principles of electronic communication, followed by a detailed explanation of SPI. Subsequently, we will delve into UART communication in the succeeding article and explore I2C in the third installment.
Although SPI, I2C, and UART operate at slower speeds compared to protocols like USB, Ethernet, Bluetooth, and WiFi, they offer simplicity and require fewer hardware and system resources. These protocols are well-suited for communication between microcontrollers and between microcontrollers and sensors, particularly when transferring large volumes of high-speed data is unnecessary.
Serial Vs. Parallel Communication
Electronic devices communicate with each other by transmitting bits of data through physically connected wires. A bit resembles a letter in a word, but unlike the 26 letters in the English alphabet, a bit is binary and can only be a 1 or 0. These bits are transferred between devices through rapid changes in voltage. In a system operating at 5 V, a 0 bit is represented by a brief pulse of 0 V, while a 1 bit is indicated by a brief pulse of 5 V.
Data can be transmitted either in parallel or serial format. In parallel communication, all the bits of data are sent simultaneously, each through its own separate wire. The diagram below illustrates the parallel transmission of the letter “C” in binary (01000011):
In serial communication, the bits are sent one by one through a single wire. The diagram below demonstrates the serial transmission of the letter “C” in binary (01000011):
Introduction To SPI Communication
SPI stands as a prevalent communication protocol utilized by various devices. For instance, SD card reader modules, RFID card reader modules, and 2.4 GHz wireless transmitter/receivers employ SPI to interact with microcontrollers.
A distinguishing feature of SPI is its ability to transfer data seamlessly. Any quantity of bits can be transmitted or received in an uninterrupted stream. In contrast, I2C and UART transmit data in packets, restricted to a specific bit count. Start and stop conditions delineate the initiation and conclusion of each packet, causing interruptions in data transmission.
Devices communicating via SPI establish a master-slave relationship. The master, typically a microcontroller, assumes control, while the slave (often a sensor, display, or memory chip) adheres to instructions from the master. The basic SPI configuration entails a single master controlling a single slave system, although a single master can govern multiple slaves (further elaborated below).
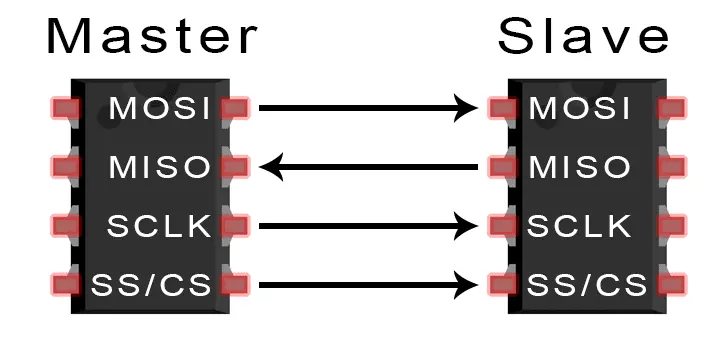
MOSI (Master Output/Slave Input) – Line facilitating data transmission from the master to the slave.
MISO (Master Input/Slave Output) – Line enabling data transmission from the slave to the master.
SCLK (Clock) – Line managing the clock signal.
SS/CS (Slave Select/Chip Select) – Line enabling the master to designate which slave to communicate with.
How Spi Works
The Clock
The clock signal synchronizes the transmission of data bits from the master to their sampling by the slave. Each clock cycle transfers one data bit, thus the speed of data transfer depends on the frequency of the clock signal. SPI communication is always initiated by the master, as it configures and generates the clock signal.
Any communication protocol where devices share a clock signal is termed synchronous, and SPI falls under this category. Conversely, asynchronous methods do not utilize a clock signal. For instance, in UART communication, both sides are configured to a predetermined baud rate dictating the speed and timing of data transmission.
The clock signal in SPI can be manipulated using clock polarity and clock phase. These properties collaborate to determine when bits are output and sampled. Clock polarity, set by the master, permits bits to be output and sampled on either the rising or falling edge of the clock cycle. Clock phase dictates whether output and sampling occur on the first or second edge of the clock cycle, irrespective of its rising or falling nature.
Slave Select
The master selects the slave it intends to communicate with by lowering the slave’s CS/SS line to a low voltage level. During the idle, non-transmitting state, the slave select line remains at a high voltage level. The master may possess multiple CS/SS pins, enabling parallel wiring of multiple slaves. In cases where only one CS/SS pin exists, multiple slaves can be connected to the master via daisy-chaining.
Multiple Slaves
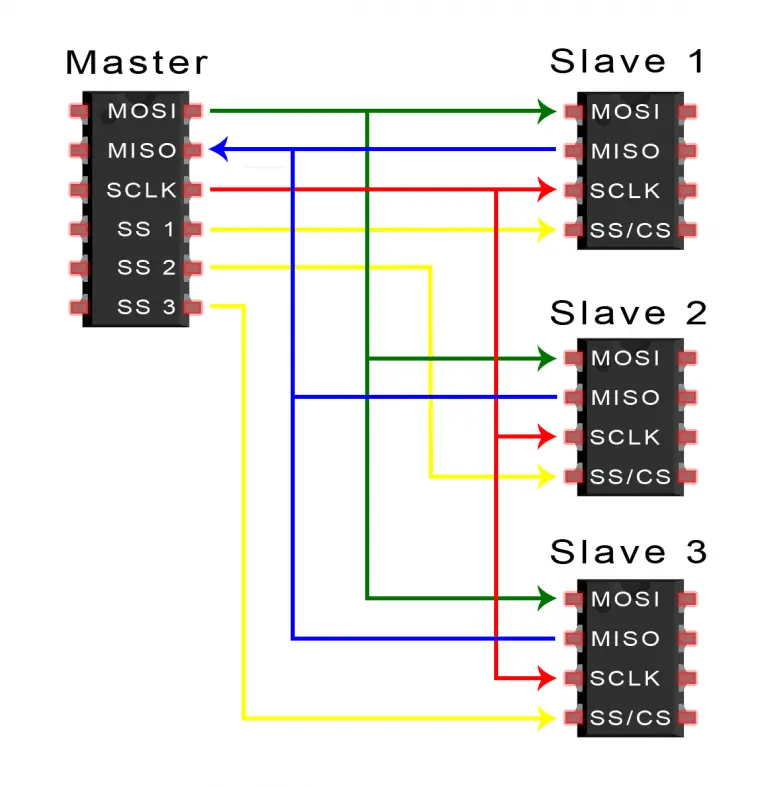
SPI can be configured to operate with a single master and a single slave, or with multiple slaves controlled by a single master. Two methods exist for connecting multiple slaves to the master. If the master has multiple slave select pins, the slaves can be wired in parallel as depicted:
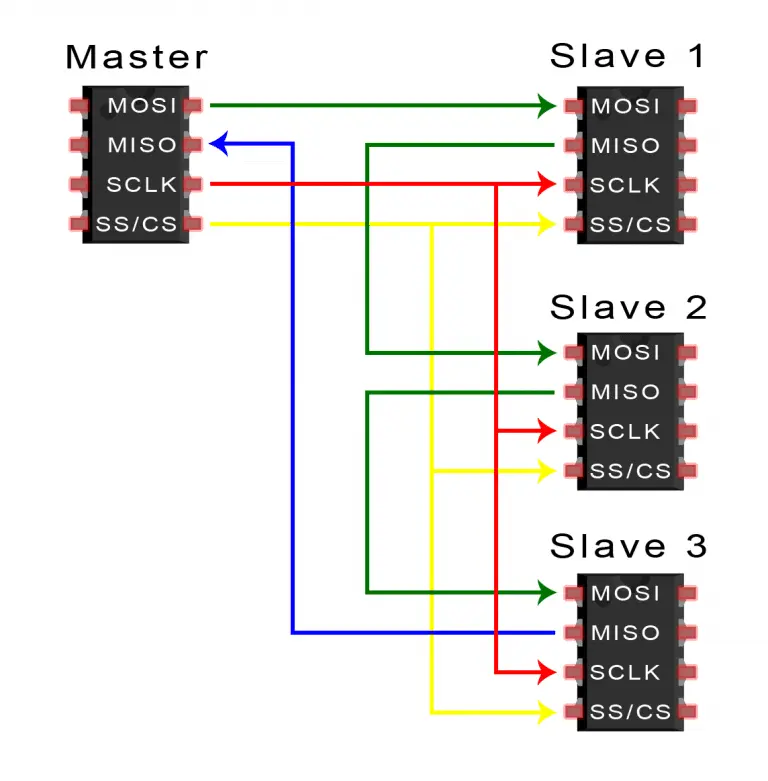
Alternatively, if only one slave select pin is available, the slaves can be daisy-chained as illustrated:
MOSI And MISO
The master transmits data to the slave bit by bit, serially through the MOSI line. The slave receives this data at the MOSI pin. Data sent from the master to the slave typically follows a most significant bit first order.
Conversely, the slave can transmit data back to the master through the MISO line in a serial manner. Data sent from the slave to the master usually follows a least significant bit first order.
Steps Of SPI Data Transmission
The master initiates the clock signal.
The master sets the SS/CS pin to a low voltage state, thereby enabling the slave.
The master transmits the data to the slave serially, one bit at a time, via the MOSI line. The slave interprets and reads the received bits accordingly.
If a response is necessary, the slave sends back data to the master serially, one bit at a time, through the MISO line. The master reads and interprets the received bits accordingly.
Advantages And Disadvantages Of SPI
There are both advantages and disadvantages to utilizing SPI, and understanding when to employ SPI based on your project’s requirements is crucial:
Advantages
- Data can be streamed continuously without interruption, as there are no start and stop bits.
- Unlike I2C, there’s no need for a complex slave addressing system.
- Offers a higher data transfer rate compared to I2C, almost twice as fast.
- Features separate MISO and MOSI lines, enabling simultaneous data transmission and reception.
Disadvantages
- Utilizes four wires (in contrast to the two wires used by I2C and UARTs).
- Lacks acknowledgment signaling the successful reception of data, a feature present in I2C.
- Does not incorporate error checking mechanisms such as the parity bit found in UART.
- Allows only for a single master.
This article aims to provide a comprehensive understanding of SPI. Proceed to part two of this series to delve into UART-driven communication, or continue to part three where the I2C protocol will be discussed.
Should you have any inquiries, feel free to ask in the comment section—we’re here to assist. Don’t forget to subscribe; we send out email notifications each time a new tutorial is published.
Related article
- Step-by-Step Guide: Arduino Integration with I2C LCD Screen
- Arduino BMP180 Guide: Barometric Pressure and Temperature
- Arduino and MS5611 Barometric Sensor: Easy Interfacing Tips
- Arduino BMP388 Barometric Pressure Sensor Integration Guide
- Arduino Tutorial: Connecting TM1637 7-Segment Display Effortlessly


